Basic Introduction to Microprocessor, Microcomputer, Microcontroller
A microprocessor is a small electronic chip that processes data and performs tasks in a computer. It is also called a processor or CPU (Central Processing Unit).
Building Blocks of microprocessor:

Components of microprocessor:
A microprocessor has three main parts
1.Arithmetic Logic Unit (ALU): It does math calculations (Sum, Subtract etc) and logical decisions (and , or etc) using data from input devices or memory.
2.Control Unit (CU): It directs the flow of data and instructions inside the microprocessor.
3.Register Array: A group of small, fast storage units that temporarily hold data and instructions while the microprocessor works.
একটি মাইক্রোপ্রসেসর হলো একটি ছোট ইলেকট্রনিক চিপ(chip) যা একটি কম্পিউটারে ডেটা প্রসেস করে এবং বিভিন্ন কাজ সম্পন্ন করে। একে প্রসেসর বা সিপিইউ (CPU – Central Processing Unit)-ও বলা হয়।
মাইক্রোপ্রসেসরের প্রধান অংশ (Building Blocks of microprocessor)
একটি মাইক্রোপ্রসেসরের তিনটি প্রধান অংশ রয়েছে:
১. ALU – Arithmetic Logic Unit): এটি ইনপুট ডিভাইস বা মেমরি থেকে ডেটা ব্যবহার করে গাণিতিক গণনা (যোগ, বিয়োগ ইত্যাদি) এবং লজিক্যাল (and, or operation) সিদ্ধান্ত নেয়।
২. (CU – Control Unit): এটি মাইক্রোপ্রসেসরের অভ্যন্তরে ডেটা এবং নির্দেশাবলীর(instruction) প্রবাহকে (flow) পরিচালনা করে।
৩. (Register Array): এটি ছোট, দ্রুত স্টোরেজ ইউনিটের একটি গ্রুপ, যা মাইক্রোপ্রসেসর কাজ করার সময় অস্থায়ীভাবে ডেটা এবং নির্দেশাবলী (instruction) ধারণ করে।
A microcomputer is a small, complete computer system built around a microprocessor. It has a CPU (microprocessor), memory, input/output devices (like keyboard and monitor), and storage.
Building Blocks of microcomputer:

Components of Microcomputer:
1.Central Processing Unit (CPU): The brain of the computer that processes instructions and controls other parts.
2.Memory: Stores data and programs temporarily (RAM) or permanently (hard drive/SSD).
3.Input Devices: Tools like a keyboard and mouse that allow users to enter data.
4.Output Devices: Devices like monitors and printers that display or produce the results of processing.
একটি মাইক্রোকম্পিউটার হলো একটি ছোট, সম্পূর্ণ কম্পিউটার সিস্টেম যা একটি মাইক্রোপ্রসেসরের ওপর ভিত্তি করে তৈরি করা হয়। এতে একটি সিপিইউ (CPU) (মাইক্রোপ্রসেসর), মেমরি, ইনপুট/আউটপুট ডিভাইস (যেমন কিবোর্ড ও মনিটর) এবং স্টোরেজ থাকে।
মাইক্রোকম্পিউটারের প্রধান অংশ (Building Blocks of Microcomputer)
একটি মাইক্রোকম্পিউটারের প্রধান অংশগুলো হলো:
১. সেন্ট্রাল প্রসেসিং ইউনিট (CPU): এটি কম্পিউটারের মস্তিষ্ক, যা নির্দেশাবলী প্রসেস করে এবং অন্যান্য অংশকে নিয়ন্ত্রণ করে।
২. মেমরি (Memory): এটি ডেটা এবং প্রোগ্রাম সাময়িকভাবে (RAM) অথবা স্থায়ীভাবে (হার্ড ড্রাইভ/SSD) সংরক্ষণ করে।
৩. ইনপুট ডিভাইস (Input Devices): কিবোর্ড ও মাউসের মতো টুলস, যা ব্যবহারকারীদের ডেটা ইনপুট করার সুযোগ দেয়।
৪. আউটপুট ডিভাইস (Output Devices): মনিটর ও প্রিন্টারের মতো ডিভাইস, যা প্রসেসিং-এর ফলাফল প্রদর্শন বা তৈরি করে।
A microcontroller is a complete computing system fully implemented on a single chip. It includes a microprocessor (CPU), memory (RAM and ROM), and input/output peripherals all integrated together.

Uses of Microcontroller:
- Home Appliances: Controls washing machines, microwave ovens, air conditioners, etc.
- Automobiles: Manages engine control, airbag systems, ABS, and other car electronics.
- Consumer Electronics: Found in remote controls, cameras, and gaming consoles.
- Industrial Automation: Controls machines, robots, and assembly lines.
- Medical Devices: Used in heart rate monitors, blood pressure devices, and other medical instruments.
- Embedded Systems: Powers smart devices like IoT gadgets, smart meters, and wearables.
একটি মাইক্রোকন্ট্রোলার হলো একটি সম্পূর্ণ কম্পিউটিং সিস্টেম যা একটি মাত্র চিপে পুরোপুরি বাস্তবায়িত হয়। এতে একটি মাইক্রোপ্রসেসর (CPU), মেমরি (RAM এবং ROM), এবং ইনপুট/আউটপুট পেরিফেরালস সবই একসাথে সমন্বিত থাকে।
মাইক্রোকন্ট্রোলারের ব্যবহার (Uses of Microcontroller)
- গৃহস্থালী সরঞ্জাম (Home Appliances): ওয়াশিং মেশিন, মাইক্রোওয়েভ ওভেন, এয়ার কন্ডিশনার ইত্যাদি নিয়ন্ত্রণ করে।
- অটোমোবাইলস (Automobiles): ইঞ্জিনের নিয়ন্ত্রণ, এয়ারব্যাগ সিস্টেম, ABS এবং অন্যান্য গাড়ির ইলেকট্রনিক্স পরিচালনা করে।
- কনজিউমার ইলেকট্রনিক্স (Consumer Electronics): রিমোট কন্ট্রোল, ক্যামেরা এবং গেমিং কনসোলে পাওয়া যায়।
- শিল্পে অটোমেশন (Industrial Automation): মেশিন, রোবট এবং অ্যাসেম্বলি লাইন নিয়ন্ত্রণ করে।5
- চিকিৎসা সরঞ্জাম (Medical Devices): হার্ট রেট মনিটর, ব্লাড প্রেসার ডিভাইস এবং অন্যান্য চিকিৎসা যন্ত্রপাতিতে ব্যবহৃত হয়।
- এমবেডেড সিস্টেম (Embedded Systems): আইওটি গ্যাজেট, স্মার্ট মিটার এবং পরিধানযোগ্য (wearables) ডিভাইসের মতো স্মার্ট ডিভাইসগুলোকে শক্তি জোগায়।


A microprocessor is the brain of a computer that performs arithmetic, logic, and control operations. Since its invention, it has evolved through five major generations, each bringing significant improvements in speed, power, and capability.
1. First Generation (1971–1978)
The first generation began with the Intel 4004, the world’s first commercially available microprocessor. It was originally designed for calculators.
- Intel 4004: 4-bit processor, 2300 transistors, 740 kHz clock speed. It could process 4 bits of data at once.
- Intel 8008: 8-bit processor introduced in 1972. It laid the foundation for early personal computers like the Altair 8800.
Limitation: Low processing power and speed, but it opened the path for microcomputers.
2. Second Generation (1978–1980)
This generation introduced improved 8-bit processors with better performance and energy efficiency.
- Intel 8085: Clock speed of 3 to 5 MHz, required fewer external components due to better integration.
- Zilog Z80: Popular in early home computers, backward compatible with Intel 8080 software.
Use: Advanced personal computers, gaming consoles, and programmable devices.
3. Third Generation (1979–1985)
The third generation brought 16-bit processors that could handle more complex tasks and support multitasking.
- Intel 8086: 16-bit processor with 5 to 10 MHz clock speed. Used segmented memory addressing to support larger programs.
- Motorola 68000: Clock speed of 4 to 16.67 MHz, special instructions for BCD arithmetic. Used in Unix workstations and Apple MacOS systems.
Use: Sophisticated personal computers, gaming systems, and industrial automation control systems.
4. Fourth Generation (1985–2000)
Known as the age of advanced computing, this generation introduced 32-bit processors and reduced the gap between personal and professional computing.
- Intel 80386: First full 32-bit x86 processor. Supported modern operating systems, virtual memory, and multitasking.
- PowerPC Processor: Developed by Apple-IBM-Motorola (AIM) for high-performance and energy-efficient computing.
Key milestones: On-chip L1 cache memory was introduced to reduce memory access delays, and transistor density increased significantly.
5. Fifth Generation (2000–Present)
The current generation features 64-bit processors with multiple cores and capabilities for AI and graphics.
- Intel Pentium 4: 32-bit processor with clock speed over 3 GHz, paving the path of modern computing.
- AMD x86-64 Architecture: Supports both 32-bit and 64-bit applications.
Advanced capabilities:
- Multi-core functionality up to 64 cores for better performance and multitasking.
- Integrated graphics support for gaming, video editing, and robotics.
- Higher energy efficiency compared to earlier g
 enerations.
enerations.
Microprocessor হলো computer-এর brain যা arithmetic, logic, এবং control operations perform করে। এর invention-এর পর থেকে এটি পাঁচটি major generation-এর মধ্য দিয়ে evolve করেছে, প্রতিটি speed, power, এবং capability-এ significant improvements নিয়ে এসেছে।
1. First Generation (1971–1978)
First generation শুরু হয় Intel 4004 দিয়ে, যা world-এর প্রথম commercially available microprocessor ছিল। এটি originally calculators-এর জন্য design করা হয়েছিল।
- Intel 4004: 4-bit processor, 2300 transistors, 740 kHz clock speed। একসাথে 4 bits data process করতে পারত।
- Intel 8008: 1972-এ introduced 8-bit processor। এটি early personal computers যেমন Altair 8800-এর foundation তৈরি করেছিল।
Limitation: কম processing power এবং speed, কিন্তু microcomputers-এর path open করেছিল।
2. Second Generation (1978–1980)
এই generation improved 8-bit processors introduce করেছে better performance এবং energy efficiency-সহ।
- Intel 8085: 3 থেকে 5 MHz clock speed, better integration-এর কারণে কম external components প্রয়োজন ছিল।
- Zilog Z80: Early home computers-এ popular, Intel 8080 software-এর সাথে backward compatible ছিল।
Use: Advanced personal computers, gaming consoles, এবং programmable devices।
3. Third Generation (1979–1985)
Third generation 16-bit processors নিয়ে এসেছে যা আরো complex tasks handle করতে পারত এবং multitasking support করত।
- Intel 8086: 16-bit processor 5 থেকে 10 MHz clock speed-সহ। Larger programs support করতে segmented memory addressing ব্যবহার করত।
- Motorola 68000: 4 থেকে 16.67 MHz clock speed, BCD arithmetic-এর জন্য special instructions। Unix workstations এবং Apple MacOS systems-এ ব্যবহৃত হতো।
Use: Sophisticated personal computers, gaming systems, এবং industrial automation control systems।
4. Fourth Generation (1985–2000)
Advanced computing-এর age হিসেবে পরিচিত, এই generation 32-bit processors introduce করেছে এবং personal এবং professional computing-এর মধ্যে gap কমিয়েছে।
- Intel 80386: প্রথম full 32-bit x86 processor। Modern operating systems, virtual memory, এবং multitasking support করত।
- PowerPC Processor: Apple-IBM-Motorola (AIM) দ্বারা developed, high-performance এবং energy-efficient computing-এর জন্য।
Key milestones: On-chip L1 cache memory introduce করা হয় memory access delays কমাতে, এবং transistor density significantly বেড়েছিল।
5. Fifth Generation (2000–Present)
বর্তমান generation 64-bit processors multiple cores এবং AI এবং graphics capabilities-সহ feature করে।
- Intel Pentium 4: 32-bit processor 3 GHz-এর বেশি clock speed-সহ, modern computing-এর path pave করেছিল।
- AMD x86-64 Architecture: 32-bit এবং 64-bit applications উভয় support করে।
Advanced capabilities:
- 64 cores পর্যন্ত multi-core functionality better performance এবং multitasking-এর জন্য।
- Gaming, video editing, এবং robotics-এর জন্য integrated graphics support।
- আগের generations-এর তুলনায় বেশি energy efficiency।

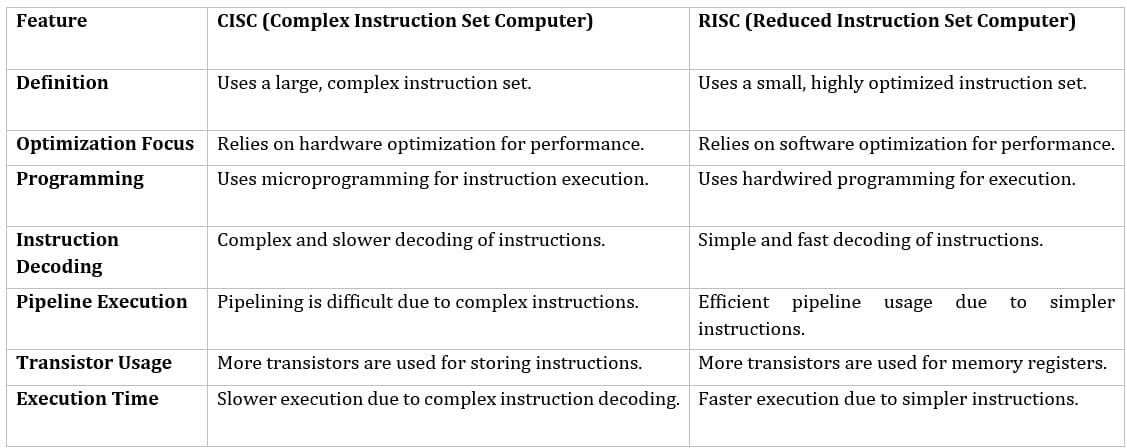
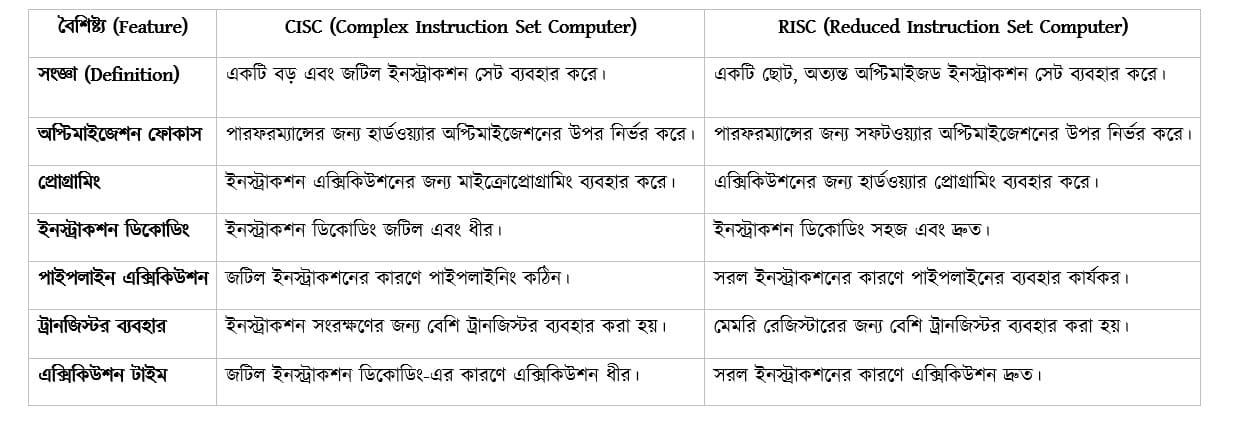
Processor and Categories of Microproecessor (CISC & RISC)
Birth of RISC (Reduced Instruction Set Computer) – Early 1980s
In the 1980s, researchers discovered something interesting: Only 20% of instructions were used 80% of the time in programs. This meant many of the complex CISC instructions were rarely used.
This led to a new idea:
- Create a smaller, simpler instruction set that contains only the most commonly used operations.
- Let the compiler handle more work by combining these simple instructions when needed.
RISC architecture focuses on a small set of simple instructions that can be executed very quickly, usually in a single clock cycle.
Thus, RISC architecture was born.
RISC Instruction Example
Load A, 1:2
Load B, 2:1
Prod A, B
Store 1:2, A

Step-by-Step Execution:
- Load A, 1:2 → Loads data from memory location 1:2 into Register A.
- Load B, 2:1 → Loads data from memory location 2:1 into Register B.
- Prod A, B → Multiplies A and B, result stored back in A.
- Store 1:2, A → Stores result from A back into memory location 1:2.
Observation:
- Simple step-by-step execution
- Requires multiple instructions (more memory)
- But each instruction is fast and takes one clock cycle
RISC (Reduced Instruction Set Computer)-এর জন্ম – ১৯৮০ এর দশকের শুরুতে
১৯৮০-এর দশকে গবেষকরা একটি গুরুত্বপূর্ণ বিষয় লক্ষ্য করলেন:
প্রোগ্রামে ব্যবহৃত instruction এর মধ্যে মাত্র ২০% instruction ৮০% সময় ব্যবহার হয়। এতে দেখা গেলো, অনেক জটিল CISC instruction খুবই কম ব্যবহৃত হয়।
এরপর একটি নতুন ধারণার তৈরি হলো আর তা হলঃ একটি ছোট, সহজ instruction set তৈরি করা যেখানে শুধুমাত্র সবচেয়ে বেশি ব্যবহৃত অপারেশন বা Instruction গুলো থাকবে।
প্রয়োজন হলে কম্পাইলারকে বেশি কাজ করতে দেওয়া হবে যাতে সে সহজ instruction গুলো মিলিয়ে জটিল কাজ সম্পাদন করতে পারে। RISC architecture মূলত ছোট সেটের সহজ instruction ব্যবহার করে যেগুলো খুব দ্রুত (সাধারণত একটি clock cycle-এর মধ্যে) এক্সিকিউট করা যায়।
এইভাবে RISC architecture-এর জন্ম হয়।
RISC Instruction Example
Load A, 1:2
Load B, 2:1
Prod A, B
Store 1:2, A
(Step-by-Step Execution)
- Load A, 1:2 → মেমরি লোকেশন 1:2 থেকে ডেটা রেজিস্টার A-তে লোড করে।
- Load B, 2:1 → মেমরি লোকেশন 2:1 থেকে ডেটা রেজিস্টার B-তে লোড করে।
- Prod A, B → A ও B-কে গুণ করে; গুনফল আবার রেজিস্টার A-তে সংরক্ষণ করা হয়।
- Store 1:2, A → রেজিস্টার A থেকে ফলাফল মেমরি লোকেশন 1:2-এ স্টোর করে।
RISC পদ্ধতিটি সহজ, ধাপে ধাপে কাজ করে। যদিও এর জন্য একাধিক নির্দেশাবলীর প্রয়োজন হয় (ফলে মেমরি বেশি লাগে), প্রতিটি নির্দেশই দ্রুত কাজ করে এবং সাধারণত একটি সিঙ্গেল ক্লক সাইকেলে সম্পন্ন হয়। এই ডিজাইন হার্ডওয়্যারকে আরও সহজ, দ্রুত এবং বিদ্যুৎ-সাশ্রয়ী করে তোলে।
 >
>
System Bus : Address Bus, Data Bus, Control Bus

Register in Microprocessor
Addressing modes of Microprocessor
Addressing Modes are techniques used by the CPU to identify the location of the operand(s) needed for executing an instruction. They provide rules for interpreting the address field in an instruction, helping the CPU fetch operands correctly.
- Opcode – Tells the CPU what operation to perform (e.g., ADD, MOV).
- Operands – The data or addresses on which the operation is performed.
Types of Addressing Modes
1. Implicit (Implied) Addressing
2. Immediate Addressing
3. Direct Addressing
4. Indirect Addressing
5. Register Addressing
6. Register Indirect Addressing
7. Displacement Addressing (Indexed, Base-Register, Relative)
8. Stack Addressing
1. Implicit (Implied) Addressing
The instruction does not mention the operand directly. The CPU knows what to use from the instruction itself, usually a special register like the accumulator or the stack.
Used for special instructions or control commands like CLA, PUSH, and RET, where the operand is automatically known from the instruction itself.
2. Immediate Addressing
The operand is part of the instruction itself. Used when the value is known while writing the program.
Example: MOV R1, #5 moves the value 5 into register R1, where #5 is the immediate value.

3. Direct Addressing
The instruction contains the memory address of the operand. The CPU accesses the data directly from that address.
Example: LOAD R1, 1000 loads data from memory address 1000 into register R1.

4. Indirect Addressing
The instruction contains the address of a memory location, which itself stores the actual address of the operand. The CPU first accesses this memory location to get the effective address, and then fetches the operand.
Example: LOAD R1, (A) loads data from the memory location whose address is stored at memory location A.
5. Register Addressing
The operand is located in a CPU register specified by the instruction.
Step: The instruction specifies a register (R). The CPU takes operand directly from register R.
Example: MOV A, B copies data from register B to register A.

6. Register Indirect Addressing
The register specified in the instruction contains the memory address of the operand.
Steps: The instruction specifies a register → The register holds the memory address → The CPU accesses that memory location to fetch the operand.
Example: LOAD R1, (R2) loads data from the memory location whose address is stored in register R2.

7. Displacement Addressing (Indexed, Base-Register, Relative)
The operand’s effective address is calculated by adding a constant value (displacement) to the contents of one or more registers.
Step: The instruction provides a base register (R) and an address part (A) → CPU adds the value of R and A to get the effective operand address → Operand is fetched from the calculated address in memory.
Example: Used for arrays, accessing an element at a position relative to a base.
8. Stack Addressing
The operand is implicitly taken from the top of the stack, without being mentioned in the instruction.
Step: Operation is performed using the value at the stack’s top (implied by instruction). No need for explicit operand field; CPU refers to stack pointer register by default.
Example: POP and PUSH operations.

The different ways in which a source operand is denoted in an instruction is known as addressing modes. There are 8 different addressing modes in 8086 programming:
1 . Immediate Addressing Mode
The addressing mode in which the data operand is a part of the instruction itself is known as immediate addressing mode.
Example: MOV CX, 4929H — The hexadecimal value 4929H is moved directly into register CX.
Example: ADD AX, 2387H — The value 2387H is added to the contents of register AX.
Example: MOV AL, FFH — The value FFH is moved into register AL.
Explanation: The data is embedded within the instruction itself. No memory or register lookup is needed. The CPU directly uses the constant value provided.
2. Register Addressing Mode
It means that the register is the source of an operand for an instruction.
Example: MOV CX, AX — Copies the contents of the 16-bit AX register into the 16-bit CX register.
Example: ADD BX, AX — Adds the contents of register AX to register BX and stores the result in BX.
Explanation: Both source and destination are CPU registers. The operation is fast because no memory access is required. If AX = 1234H, after MOV CX, AX, CX = 1234H.
3. Direct Addressing Mode
The addressing mode in which the effective address of the memory location is written directly in the instruction.
Example: MOV AX, [1592H] — Moves the data from memory address 1592H into register AX.
Example: MOV AL, [0300H] — Moves the data from memory address 0300H into register AL.
Explanation: The instruction contains the full 16-bit memory address inside square brackets. The CPU accesses that exact memory location to fetch the operand. DS (Data Segment) register is used as the default segment.
4. Register Indirect Addressing Mode
This addressing mode allows data to be addressed at any memory location through an offset address held in any of the following registers: BP, BX, DI, and SI.
Example: MOV AX, [BX] — Suppose register BX contains 4895H, then the contents at memory address 4895H are moved to AX.
Example: ADD CX, [BX] — Adds the data at memory address pointed by BX to register CX.
Explanation: The register holds a memory address, not the actual data. The CPU first reads the register to get the address, then goes to that memory location to fetch the operand. If BX = 4895H and memory 4895H contains 7A3BH, then AX = 7A3BH.
5. Based Addressing Mode
In this addressing mode, the offset address of the operand is given by the sum of contents of the BX/BP registers and 8-bit/16-bit displacement.
Example: MOV DX, [BX+04] — The effective address is BX + 04H. Data from that memory address is moved to DX.
Example: ADD CL, [BX+08] — Adds data from memory address (BX + 08H) to register CL.
Explanation: The base register (BX or BP) provides a starting address, and a fixed displacement is added to calculate the final memory address. If BX = 2000H, then effective address for [BX+04] is 2004H. Useful for accessing structure fields or array elements with fixed offsets.
6. Indexed Addressing Mode
In this addressing mode, the operand’s offset address is found by adding the contents of SI or DI register and 8-bit/16-bit displacements.
Example: MOV BX, [SI+16] — The effective address is SI + 16. Data from that memory address is moved to BX.
Example: ADD AL, [DI+16] — Adds data from memory address (DI + 16) to register AL.
Explanation: The index register (SI or DI) holds a variable offset, and a constant displacement is added. If SI = 1000H, then effective address for [SI+16] is 1010H. Commonly used for array processing where SI/DI acts as the array index.
7. Based-Index Addressing Mode
In this addressing mode, the offset address of the operand is computed by summing the base register to the contents of an index register.
Example: ADD CX, [BX+SI] — The effective address is BX + SI. Data from that memory address is added to CX.
Example: MOV AX, [BX+DI] — The effective address is BX + DI. Data from that memory address is moved to AX.
Explanation: Combines a base register (BX/BP) and an index register (SI/DI). Both are variable values. If BX = 2000H and SI = 0100H, then effective address is 2100H. Ideal for two-dimensional arrays or tables where base points to the start and index points to the element.
8. Based Indexed with Displacement Mode
In this addressing mode, the operand’s offset is computed by adding the base register contents, an index register’s contents, and 8-bit or 16-bit displacement.
Example: MOV AX, [BX+DI+08] — The effective address is BX + DI + 08H. Data from that memory address is moved to AX.
Example: ADD CX, [BX+SI+16] — The effective address is BX + SI + 16. Data from that memory address is added to CX.
Explanation: This is the most flexible mode combining base register, index register, and a fixed displacement. If BX = 2000H, SI = 0100H, and displacement is 08H, then effective address is 2108H. Used for accessing complex data structures like records within arrays or structures with multiple fields.
Addressing modes in 8085 are instructions used to transfer data from one register to another register, from memory to register, and from register to memory without any alteration in the content. Addressing modes in 8085 are classified into 5 groups:
1. Immediate Addressing Mode
In this mode, the 8-bit or 16-bit data is specified in the instruction itself as one of its operands.
Example: MVI K, 20H — The hexadecimal value 20H is copied directly into register K.
Explanation: The data 20H is part of the instruction. No memory access is needed. The CPU directly puts 20H into register K.
2. Register Addressing Mode
In this mode, the data is copied from one register to another register.
Example: MOV K, B — The data stored in register B is copied to register K.
Explanation: Both source and destination are CPU registers. No memory is involved. If B = 35H, then after execution, K = 35H also.
3. Direct Addressing Mode
In this mode, the data is directly copied from the given memory address to the register.
Example: LDA 5000H — The data stored at memory address 5000H is loaded into accumulator A.
Explanation: The instruction contains the full 16-bit memory address (5000H). The CPU goes to that exact memory location and fetches the data into accumulator A.
4. Indirect Addressing Mode
In this mode, the data is transferred from memory to register by using the address pointed by a register pair.
Example: MOV K, M — Data is transferred from the memory address pointed by register pair HL to register K.
Explanation: The HL register pair holds a memory address. The CPU first reads HL to find the address, then goes to that memory location to fetch the data into register K. If HL = 2050H and memory location 2050H contains 7AH, then K = 7AH.
5. Implied (Implicit) Addressing Mode
This mode does not require any operand; the data is specified by the opcode itself.
Example: CMA — Complement the contents of accumulator A.
Explanation: The instruction CMA does not mention any register or memory address. The CPU automatically knows it must work on the accumulator A. If A = 1010 1100, after CMA, A = 0101 0011 (all bits are inverted).
Another Example: STC — Set Carry flag to 1. No operand needed. The CPU directly sets the carry flag in the flag register.